Cable Repair Ship - T-ARC
The Cable Repair Ship performs maintenance on the Sound Surveillance System (SOSUS) which is a network of strategically placed sonar sensors that provide early warning of submarines. The T-ARC class is capable of laying and retrieving deep water acoustic cables, and is also capable of supporting oceanographic research.
USNS Zeus is the only active Cable Repair Ship in the U.S. Navy. ZEUS is the first multi-mission cable ship designed and built by the U.S. Navy specifically as a cable ship. It incorporates advanced propulsion features, centralized integrated displays for monitoring ship and cable machinery parameters and functions, passive flume stabilization, better maneuverability and cable handling capabilities at both bow and stern, and survey equipment designed to combine high performance and versatility with minimal maintenance.
Main propulsion is diesel-electric (5 GM diesels), rated horse power is 10,000 (5,000 to each of two shafts), 5 main generators (GE), and 4 motor generators. ZEUS combines the main propulsion system with bow and stern-mounted tunnel thrusters in an integrated control system which provides the precise trackkeeping and position holding capabilities required for cable laying and repair, array laying operations, projector towing, acoustic surveys, and other mission tasks. Application of roll dampening techniques enable the ship to provide a stable platform for safe cable operations at slow speeds up to the maximum permissible sea states specified for each mission.
The Military Sealift Command operates ships manned by civilian crews and under the command of a civilian master. These ships, indicated by the blue and gold bands on their stack, are "United States Naval Ships" vice "United States Ships" as is the case of commissioned ships.
USNS ZEUS is fitted with a wide array of cable handling equipment including 5 cable tanks, cable transporters, DO-HB tension machines, self fleeting cable drums, overboarding sheaves, and dynamometer cable fairleader. The secondary mission of the USNS ZEUS is Oceanographic Survey. USNS ZEUS is fitted with both single beam and multi-beam (SIMRAD EM 121) sonars for bottom profiling and can deploy towed sidescan sonars and camera sleds. CTD systems and deployed Acoustic Measurement Buoys (AMB) and Environmental Measurement Buoys (EMB) provide data measurement of the ocean environment.
In a major initiative to harden deployed systems, the USNS ZEUS will be fitted with a Heavy Overboarding System (HOS). The HOS is a 32.5 metric ton A-frame designed and built by Soil Machine Dynamics, Ltd.. This system is designed to handle and deploy the CRS I & II, free swimming Remotely Operated Vehicles (ROVs), the Sea Tractor, a bottom crawler, and the Sea Plow.
General Characteristics, USNS Zeus
Shipbuilder National Steel & Shipbuilding 
Year completed/Location 1984/San Diego, CA LOA 513'02" Breadth (max) 73' Draft (max) 25'11 3/4" Nav Draft 27'9 3/4" Displacement, FL (tons) 14,335 Displacement, LL (tons) 8,600 Max HT above keel 112' Max Speed 15kts Endurance 10,000 nm Crew: 88 civilian and 6 military and 30 technical Cable Repair Systems (CRS I & II)
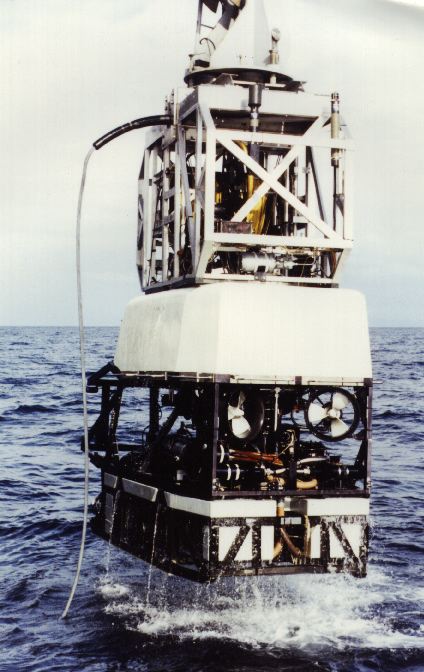
The Cable Repair Systems (CRS I & II) are free swimming, remotely operated vehicles. They are controled through a fiber optic umbilical to a Tether Management System (TMS). A neutrally bouyant tether allows the CRS to operate freely within a 600 foot radius of the TMS. In addition to the installed control and navigation systems, the CRSs are fitted with jetting skids to assist in trenching and cable burial. The systems are mission portable. They can be airlifted and deployed from vessels as small as ocean tugs.
Specifications:
- MODEL: CRS, based on HYDRA AT 1850
- SERIAL #: CRS I and CRS II
- MANUFACTURER: Oceaneering International, Inc.
- OPERATING DEPTH: 6000 feet
- DIMENSIONS (LxWxH) (FT) 10 x 6 x 6
- TETHER MANAGEMENT ASSEMBLY (LxWxH):10 x 5 x 6
- WEIGHT IN AIR: Vehicle - 9000 lbs (13000 lbs w/TMS & Jetter)
- SPEED: Max Operating Current 5 kts
- STRUCTURE: Syntactic foam atop an open frame of t6061 aluminum members. Stainless steel fixtures.
- BUOYANCY CONTROL: Vehicle is positively buoyant. Depth is controlled by thrusters. Payload: 91kg
- POWER REQUIREMENTS: 460VAC, 3-phase, 60hz
- PROPULSION: Six hydraulic thrusters, two forward/reverse, two vertical, two lateral. Forward thrust: 154kg: reverse thrust: 111kg.
- INSTRUMENTATION: Vehicle: Two TV cameras (Osprey OE1323 SIT B &W or OE1361 color video) on pan/tilt device. Scanning sonar (Mesotech Model 971). Manipulators ((2) 7 function Magnum 1000, spacially correspondant). Depth sensor (Ametek 258). TMA: TV camera (Osprey CCD OE1360A) on pan/tilt device, five 250W lights (Remote Ocean Systems QL3000). Tools: Jetting Skid; Shear cutters for wire rope and soft line; wire gripper.
- NAVIGATION: Fluxgate magnetic compass: ORE Track Point II or Nautronics acoustic tracking system.
- SHIPBOARD COMPONENTS: Control console, hydraulic power unit, surface handling system (DYNACON).
- OPERATING/MAINTENANCE CREW:Varies
- REMARKS: The US Navy ROV systems are optimized for under sea cable repair and burial.

Sea Tractor
The Sea Tractor is a 250 HP underwater system for the burial of cable in a wide range of bottom conditions using a dedicated set of cable burial tools. The Sea Tractor System is designed to be launched and recovered from the beach, from the deck of a dedicated ship using the Heavy Overboarding System (HOS), or from a suitable vehicle of opportunity (VOO) with an adequate handling system. The Sea Tractor is designed to perform the following tasks: (1) Locate and track cable, (2) Visually inspect cable, (3) Bury cable in a variety of soil conditions, (4) Bury in-line repeaters, (5) Assist in cable retrieval, (6) Cut or move cable.
Specifications:
- MODEL: Sea Tractor Mk I Mod 0
- MANUFACTURER: Oceaneering Technologies Inc
- OPERATING DEPTH: 4900 feet
- DIMENSIONS (LxWxH)(FT): 11 x 17 x16
- WEIGHT IN AIR: Vehicle - 37,500,
- SPEED: Max Surface - 3000 m/hr
- STRUCTURE: Steel pontoon/track system by Quality Engineering. Steel Frame. Manipulator arm, composed of a seven function modified HIAB Model 80 Seacrane, with a lift rating of 9000 lbs at 1.8m and 2380 lbs at 7m.
- BUOYANCY CONTROL: Track foot print supports operations in 14 kpa soil. Payload: 8,800-13,200 lb
- POWER REQUIREMENTS: 460VAC, 3-phase, 60hz
- PROPULSION: Two 125 hp Sunstar/Rexroth hydraulic power units driving two 40 hp hydraulic motors for tracks and two Hydrovision Curvetech HS300 thrusters for rotation in the water column.
- TOOLS/INSTRUMENTATION: Five TV cameras ((4)Simrad Osprey Nighthawk ICCD-W & (1)Simrad Osprey TV 3500-6) with two each, 250W lights (Remote Ocean Systems QL 3000). Scanning sonar (UDI Sonavision 4000 200 Khz). Depth sensor (Simrad 807). Magnetic cable tracker (Innovatum Multi-Tracker Ultra). Tools: Shear cutters; wire gripper; Jetter ((2) High pressure and (6) Low pressure nozzles, (2) Fybroc series Low Pressure Water Pumps 500 gpm @ 80psi, (3)Hotsy Series 2000 High Pressure Water Pumps 10 gpm @1250 psi) Cable Burial - Depth variable to 1m, Width variable 150-500mm; Chain Cutter (Ditch Witch Model 710 modified for subsea use. Cable Burial - Depth variable to 2.2m, Width 200mm); Rock Cutter (Ditch Witch Model 840 modified for subsea use), Cable Burial - Depth variable to 1.1m, Width 150mm
- NAVIGATION: Fluxgate magnetic compass (KVH); Track Point II or Nautronics acoustic tracking system.
- SHIPBOARD COMPONENTS: Control console, HPU/Levelwind/Winch, surface handling system (Heavy Overboarding System).
- OPERATING/MAINTENANCE CREW: Varies
- REMARKS: The US Navy Sea Tractor systems are optimized for under sea cable burial.

Sea Plow
The U.S.Navy operates a standard SMD model SCP1 cable plow. This plow uses a patented burial method which ensures that the cable has optimum protection beneath an almost undisturbed seabed in which the soil retains most of its strength. The plow can trench to 1100mm in a range of soil types. It is remotely operated from a control van on the surface vessel. The control van and the plow are linked via a small diameter, fiber optic umbilical which allows very long transmission lengths.
- MODEL: Sea Plow SCP 1
- MANUFACTURER: Soil Machine Dynamics Ltd.
- OPERATING DEPTH: 1500m
- DIMENSIONS (LxWxH): 900cm x 460cm x 380cm
- WEIGHT IN AIR: Vehicle - 14000kg,
- SPEED OF OPERATION: Tow speeds up to 1.5km/hour in most soil conditions
- STRUCTURE: Fabricated from high strength steel. Max pull at plow 50 tones. Burial depth: 0 - 1000 mm. Cable size 20 - 125mm . Repeaters up to 380mm
- Steering +/- 12 degrees. Tow force 10 - 50 metric tons
- BUOYANCY CONTROL: NA; Soil strengths 10 - 100 kPa. Will float on 5 kPa.
- POWER REQUIREMENTS: 460VAC, 3-phase, 60hz
- PROPULSION: Towed by surface vessel
- INSTRUMENTATION: Three TV cameras (Simrad Osprey OE 1324 SIT) with five 150W lights (Birns SOR II). Two of the cameras are mounted on electrically powered subsea pan and tilt units (Osprey OE 1148) at the front and rear of the plow. Scanning sonar (Mesotech 971-1 200m). Depth sensor (Mesotech 807 30m). Hydrophone (Benthos AQ17).
- NAVIGATION: Fluxgate magnetic compass(KVH C 100): Track Point II or Nautronics acoustic tracking system.
- SHIPBOARD COMPONENTS: Control van, hydraulic power unit, Tow winch, Umbilical winch, surface handling system (Heavy Overboarding System).
- OPERATING/MAINTENANCE CREW: Four
- REMARKS: NA.

Sources and Methods
- USNS Zeus (T-ARC 7)
- Cable Repair Ship - T-ARC
- Tethered, Free Swimming ROVs Cable Repair Systems (CRS I & II)
- Bottom Crawling ROV Seatractor
- Towed Bottom and Structurally Reliant ROV
- IUSS Operations Support Center (IOSC) [really nice!!]